3. 프로그램
이 섹션에서는 레이저 평가를 위한 프로그램의 주요 기능과 사용법을 상세히 다룹니다.
3.1. 메인 화면
각 파트의 기능들은 다음과 같습니다. [3.1.x]
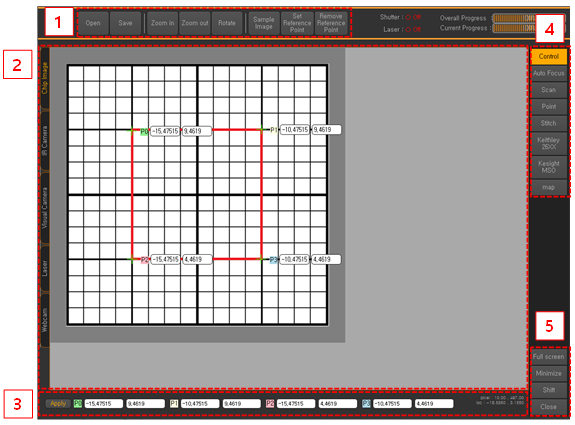
Figure 14. 메인 화면
3.1.1. 간단한 조작버튼
- Open: 이미지 파일 열기
- Save: 저장
- Zoom in: 이미지 확대
- Zoom out: 이미지 축소
- Rotate: 이미지 회전
- Sample Image: Chip 이미지 없을 경우 Sample 이미지 (Figure 10의 격자 그림)
- Set Reference Point: 현재 위치에 Reference Point 생성 (핑크색)
- Remove Reference Point: Reference Point 삭제
3.1.2. Image View
Chip Image, IR / Visual Camera 등의 기능을 선택할 수 있는 파트입니다.
3.1.2.1. Chip Image
상단 바에서 Open을 눌러 Chip Image를 불러올 수 있고 이 영역에서 위치 정보 Set-up을 진행할 수 있습니다
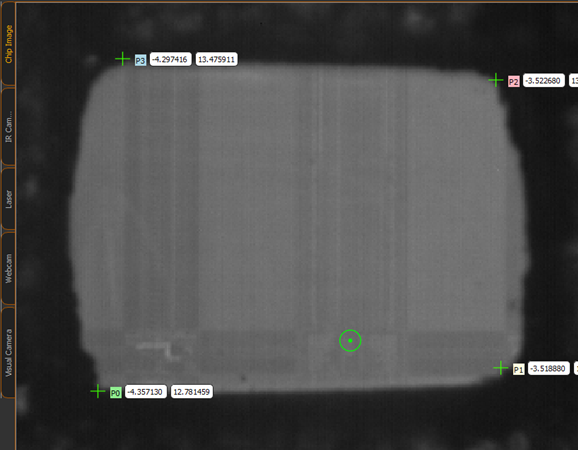
Figure 15. Chip Image
3.1.2.2. IR Camera
적외선 카메라로 비파괴적으로 Chip의 내부를 보기 위해 사용합니다. Sofrtware Connection과 Auto Offset and Gain기능을 켜주면 Chip내부를 더 선명하게 볼 수 있습니다.
.png)
Figure 16. IR Camera(5배 렌즈)
- Calibration file: 보정 파일
- Software Connection: 화질 보정
- Auto Offset and Gain: 자동으로 밝기 및 대비 조정
- Sharpening: 화질을 선명하게 해줌
- 20/100X Indicator: 20/ 100X Image Scale 생성 (미구현)
- Crosshair: 화면 중앙에 Crosshair 생성
3.1.2.3. Visual Camera
Chip의 패턴에 직접 Focus할 수 없기 때문에 Visual Camera(가시광선 카메라)를 통해 Chip표면에 Focus한 후 패턴이 있는 Depth만큼 내려가 레이저를 조사합니다.
.png)
Figure 17. Visual Camera(5배 렌즈)
Scan 시작 시 자동으로 꺼짐
- Setting
- Exposure Time: 노출시간 (미구현)
- Gain: 밝기 값
Figure 18. Visual Camera settings
- Crosshair
- 화면 중앙에 Crosshair 생성
3.1.2.4. Laser
Pulsed Laser장비를 조작할 수 있는 Web Viewer입니다. 레이저 조사 시에 ‘Main output is open’인지 확인해야 합니다
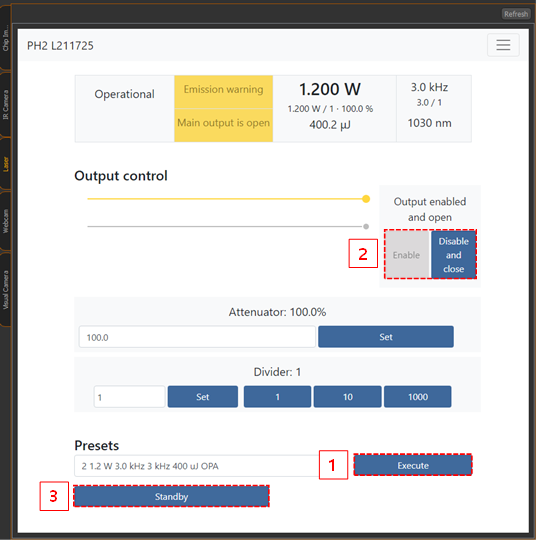
Figure 19. Laser
- Execute 시 10분간의 안정화 시간 필요
- 레이저 활성화 시 1 → 2 순서대로 클릭
- 동작 실행
- 레이저 활성화 및 비활성화
- 대기 모드
3.1.2.5. Webcam
테스트 도중 문을 열지 않고 DUT의 상태 및 위치를 확인할 수 있습니다.
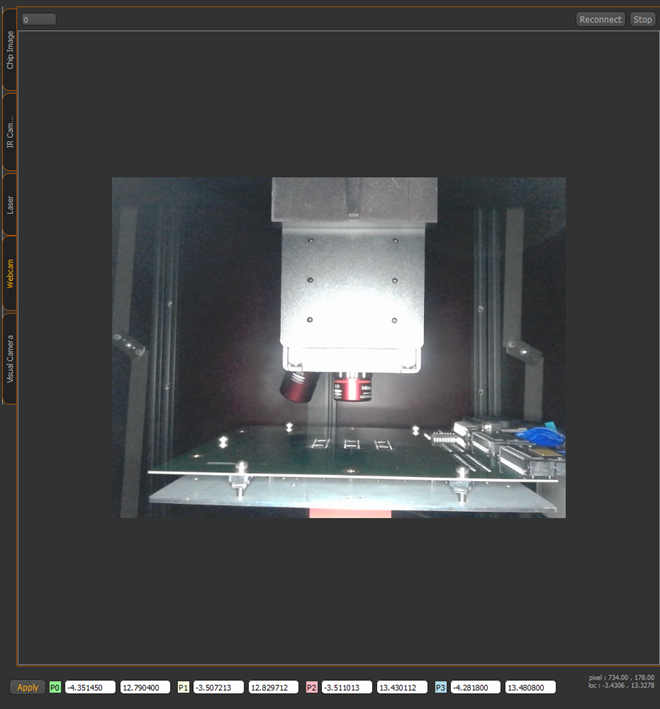
Figure 20. Webcam
- DUT의 측면을 볼 수 있는 Webcam
- Z축 이동 시 Objective Lens와 Stage의 충돌 방지를 위함.
- Reconnect 시 Webcam Light ON
3.1.3. 이미지 좌표 입력
수동으로 Point0~3까지 좌표를 입력할 수 있는 영역입니다. Chip Image에서 마우스 우 클릭 후 ‘Put Current pos(position) to p0~3’를 통해 좌표를 지정하고 Apply시 자동으로 좌표가 입력됩니다.
3.1.4. 패널 오픈
Control, Auto Focus 등 여러가지 기능이 있는 패널이 있는 영역입니다.
3.1.5. 창 크기
- Full Screen: 전체 화면
- Minimize: 창 모드
- Shift: 듀얼 모니터일 경우 옆 화면으로 이동
- Close: Save 후 종료 (Close가 아닌 비정상적인 종료 시 Save 되지 않을 수 있음)
3.2. Control 패널
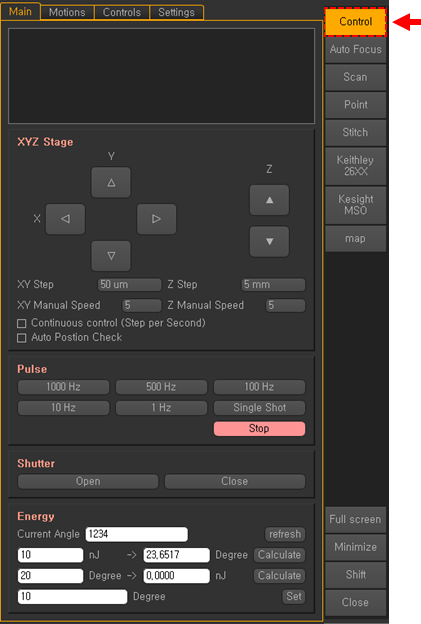
Figure 21. Control 패널
Pulsed Laser 장비에 대한 기본적인 연결 및 수동 컨트롤을 제공하는 패널입니다. 패널의 상단의 탭을 선택하여 여러가지 페이지에서 작업을 수행 할 수 있습니다. 탭의 종류는 Main, Motions, Controls, Settings가 있고 각 탭이 포함하는 기능은 다음과 같습니다.
3.2.1. Main 탭
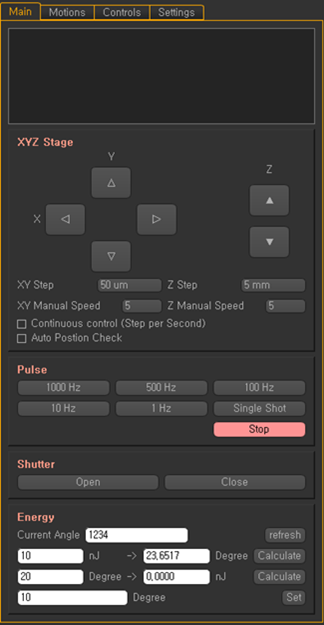
Figure 22. Main 탭
Main 탭 에서는 여러가지 탭에서의 기능을 한번에 사용 할 수 있도록 제공합니다. 버튼이나 체크 박스 등은 같은 기능의 다른 패널과 연결되어 있는 구조로 정확히 동일한 기능을 수행합니다.
- XYZ Stage: 간단한 XYZ stage 컨트롤을 수행. Continuous control을 체크 하면 stage가 방향키를 누르는 동안 MANUAL SPEED로 움직이고, 아닐 경우 step size 만큼 이동
- Pulse: 해당 주파수로 레이저 펄스 발생 [3.2.3.2]
- Shutter: 셔터를 열거나 닫음 [3.2.3.1]
- Energy: 편광자의 각도를 조정하여 에너지를 조절함 [3.2.3.4]
3.2.2. Motion 탭
Motion탭에서는 XYZ Stage, Objective Lens, Piezo Stage등을 이동 및 조작할 수 있습니다.
3.2.2.1. XYZ
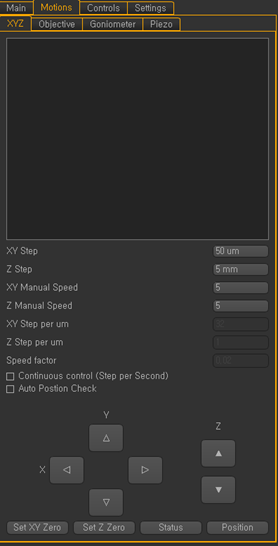
Figure 23. XYZ 탭
|
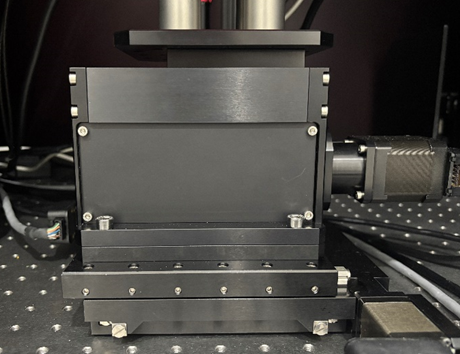
Figure 24. XYZ Stage
|
Pulsed Laser 장비의 XYZ 스테이지를 컨트롤 하는 페이지입니다. 각 기능의 설명은 다음과 같습니다.
- XY Step: XY에 해당하는 방향키를 한 번 클릭했을 때 이동하는 거리 (Continuous control이 아닐 때 적용)
- Z Step: Z에 해당하는 방향키를 한 번 클릭했을 때 이동하는 거리 (Continuous control이 아닐 때 적용)
- XY Manual Speed: XY축 이동 스피드 (Continuous control일 때 적용)
- Z Manual Speed: Z축 이동 스피드 (Continuous control일 때 적용)
- XY Step per μm: 모터 스텝 당 거리 이동 비 (기본 값: 32, Setting에서 Developer Edit mode를 세팅하여 수정 가능)
- Z Step per μm: 모터 스텝 당 거리 이동 비 (기본 값: 5, Setting에서 Developer Edit mode를 세팅하여 수정 가능)
- Speed factor: 거리 변수 단순 곱 증가
- Continuous control: 설정 시 클릭을 유지하는 것으로 이동, 비 설정 시 한 번의 클릭으로 세팅 된 거리(Step값) 만큼 이동
- Auto Position Check: 설정 시 실시간으로 현재 위치를 계산해서 Chip Image 위에 원형 점으로 위치를 표시. (미 설정 후 Scan시 현재 위치 표시x)
- 방향키: 해당 방향으로 스테이지를 이동 (Z 스테이지의 경우 위 방향키는 렌즈와 가까워지는 방향 임으로 충돌에 유의를 요함)
- Set XY zero: 현재 위치로 zeroing 수행
- Set Z zero: 현재 위치로 zeroing 수행
- Status: 스테이지로부터 스테이터스 값 read
- Position: 스테이지로부터 포지션 값 read
3.2.2.2. Objective (대물렌즈)
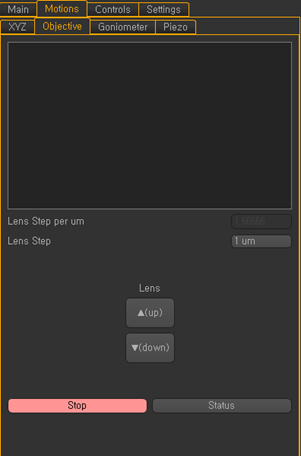
Figure 25. Objective 탭
|

Figure 26. Objective Lens
|
Objective Lens(대물 렌즈)의 이동을 수행합니다.
- Lens Step per μm: Objective에 따른 고정 값이고 정확한 거리를 이동하기 위해서 정확한 값으로 설정. (해당 장비에서는 1.6666) Lens Step은 버튼 클릭 당 이동하는 거리.
- Lens Step: 방향키를 한 번 클릭했을 때 렌즈 이동 거리 설정
- Stop: 렌즈 이동 중 정지
- Down시 렌즈와 Stage의 충돌 유의
Table 1. Pulsed Laser Specifications
| Objective | Working Distance (mm) | Focal Length(mm) | Numerical Aperture |
|---|---|---|---|
| 5x | 37.5 | 40 | 0.14 |
| 20x | 20 | 10 | 0.4 |
| 100x | 10 | 2 | 0.7 |
-Working Distance: 작업 시 DUT와 Lens사이의 거리
3.2.2.3. Goniometer(각도 제어 장치)
DUT의 크기가 크면 DUT가 휘어 있는 경우가 있습니다. Goniometer의 조정을 통해 DUT의 각도를 수정하여 수평을 맞출 수 있습니다.
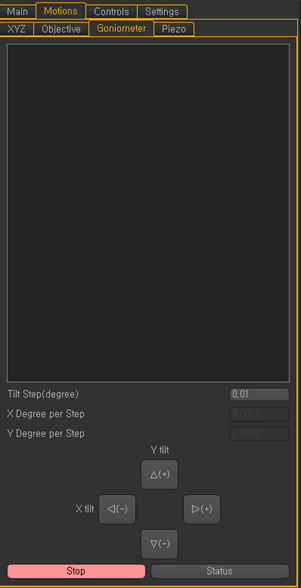
Figure 27. Goniometer 탭
|

Figure 28. Goniometer
|
수동으로 스테이지의 각도를 제어하는 기능입니다.
- X Degree per Step과 Y Degree per Step은 Stage 따른 고정 값이고 정확한 거리를 이동하기 위해서 정확한 값으로 설정. (기본 장비에서는 0.00032, 0.00045)
- Tilt Step을 통하여 버튼 클릭당 이동할 기울기를 설정하고, 방향키를 클릭하여 기울기를 변경가능.
3.2.2.4. Piezo
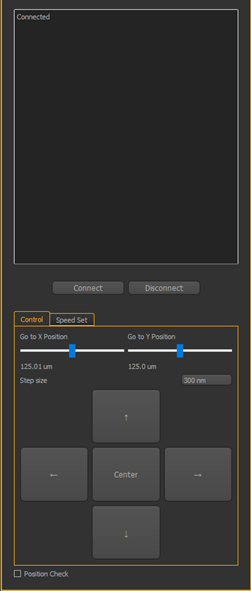
Figure 27. Piezo 탭
|

Figure 28. Piezo
|
Piezo 스테이지 컨트롤 패널입니다. Piezoelectric motor를 사용하여 nano meter 단위로 매우 정밀하게 이동 가능합니다. Piezo Stage 사용 시 중량이 0.3kg을 초과해선 안됩니다.
- Connect: Piezo Stage 연결
- Disconnect: Piezo Stage 연결 끊기
- Go to X/Y Position: Piezo Stage를 슬라이드바를 통해 X/Y축 방향으로 이동 가능
- 방향키: Step Size만큼 해당 방향으로 이동
- Center: Piezo Stage를 원점으로 이동
3.2.3. Control 탭
Pulsed Laser 조사, Pulse Energy측정 등 레이저 장비의 Control을 할 수 있는 탭입니다.
3.2.3.1. Shutter 탭
Pulsed Laser 조사, Pulse Energy측정 등 레이저 장비의 Control을 할 수 있는 탭입니다.

Figure 31. Shutter
장비에는 두 개의 Shutter가 있고 그 중 polarizer에 도달하기 전에 있는 Shutter를 컨트롤합니다. 해당 Shutter는 장비에 연결된 안전 장치와 연결되어 있어 문이 열리면 Shutter는 자동으로 닫힙니다.
- Open: shutter open
- Close: shutter close
- Light ON: 전등 ON (추가 컨트롤 박스 이용 시)
- Light OFF: 전등 OFF (추가 컨트롤 박스 이용 시)
3.2.3.2. Pulse 탭
Pulsed Laser 조사, Pulse Energy측정 등 레이저 장비의 Control을 할 수 있는 탭입니다.

Figure 32. Pulse
Pulse 탭은 RADTEST의 Control-Box의 펄스 기능 컨트롤을 합니다.
- 1Hz ~ 1000Hz: 해당 주파수로 레이저 펄스 발생
- Single Shot: 클릭 시 1회 레이저 조사
- Stop: 주기 레이저 OFF
3.2.3.3. PEM(Pulse Energy Meter)탭
Pulsed Laser 조사, Pulse Energy측정 등 레이저 장비의 Control을 할 수 있는 탭입니다.
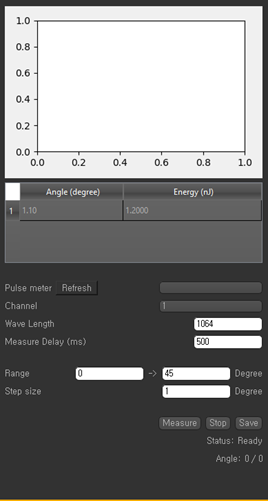
Figure 33. PEM 탭
|

Figure 34. PEM
|
Polarizer 각도에 따른 Pulse 에너지를 측정하는 부분입니다. DUT 위치에서 PEM 설치 후 Visual Camera를 통해서 초점을 맞춘 후 300μm 정도 PEM와 objective lens가 가까워지게 하여(결과 consistency를 위해서) 측정을 수행합니다.
- Pulse meter: refresh를 눌러서 연결된 펄스 미터 컨트롤 박스를 검색 후 설정.
- Channel: 컨트롤 박스에 연결된 위치에 따라서 맞는 Channel를 설정.
- Wave Length: 측정할 레이저의 파장을 입력.
- Measure Delay: 각 측정 사이의 시간 딜레이 값 (추천 값 500ms)
- Range: 내부 Polarizer의 회전 각도 범위(레이저 에너지는 90도 기준으로 반복되므로 45도 정도로 설정)
- Step Size: 각 측정 각도의 단위
- Measure 버튼: 측정 시작
- Stop 버튼: 현 지점에서 측정 정지
- Save 버튼: 측정된 데이터 저장
3.2.3.4. Energy탭
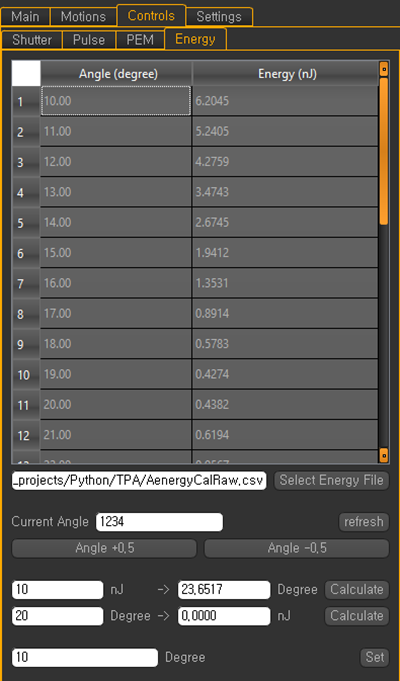
Figure 35. Energy 탭
Energy 탭은 Select Energy file 버튼으로 Energy file (RAW Energy file)을 가져와 특정 에너지를 위한 각도, 특정 각도에서의 에너지를 계산하고 해당 각도로 편광자를 설정 할 수 있습니다
- Select Energy File 버튼: 해당 버튼을 통해 에너지 파일을 선택
- Current Angle: refresh 버튼을 통해서 읽어 옴, 현재 세팅 된 편광자(polarizer) 각도
- Angle +-0.5: 편광자의 각도 조정
- nJ(Nano joule) ->Degree: nJ에 칸에 에너지 값을 넣고 Calculate 버튼을 누르면 해당하는 각도를 계산
- Degree->nJ: Degree 칸에 각도 값을 넣고 Calculate 버튼을 누르면 해당하는 에너지를 계산
- Polarizer의 최소 설정 각도 값은 0.005˚이므로 특정 에너지로 설정하고자 할 때 오차에 유의
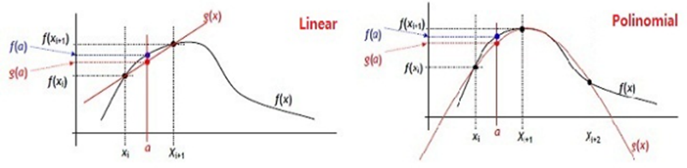
Figure 36. Linear interpolation and Polynomial interpolation
- 특정 에너지를 위한 각도, 특정 각도에서의 에너지를 계산을 위해서 Linear interpolation함. 사용자는 오차에 유의.
3.2.4. Setting 탭
장비와 컴퓨터의 연결 및 프로그램 설정을 할 수 있는 탭입니다.
3.2.4.1. Connection
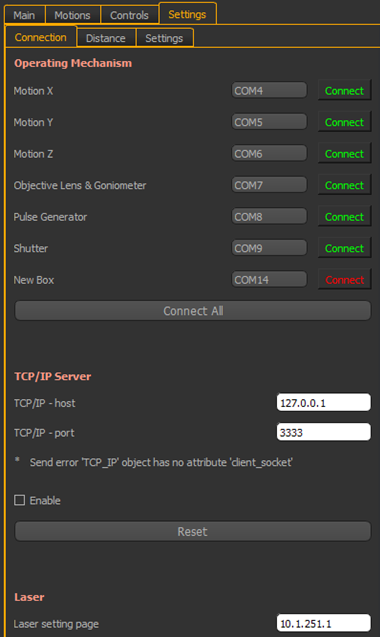
Figure 37. Connection
해당 탭에서 각 장비의 COM port(Serial Port)의 설정, 연결 확인을 할 수 있습니다. 프로그램 시작 시 이전에 설정해 둔 COM port로 자동 연결합니다.
3.2.4.2. Settings
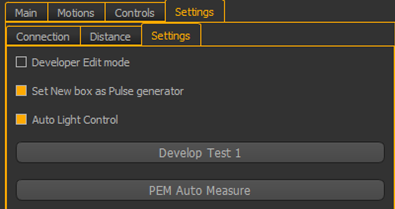
Figure 38. Settings
- Developer Edit: 비활성화 되어 있는 칸들을 활성화시켜주어 Edit가능.
- PEM Auto Measure: 펄스 미터를 세팅해 놓으면 30분에 1번씩 자동으로 에너지를 측정.
3.3. Auto Focus 패널
Auto Focus 패널에서는 Focus 측정, Auto Focus, Corner Detection, Leveling 을 수행 할 수 있습니다. 간편한 Focusing을 위한 기능입니다.
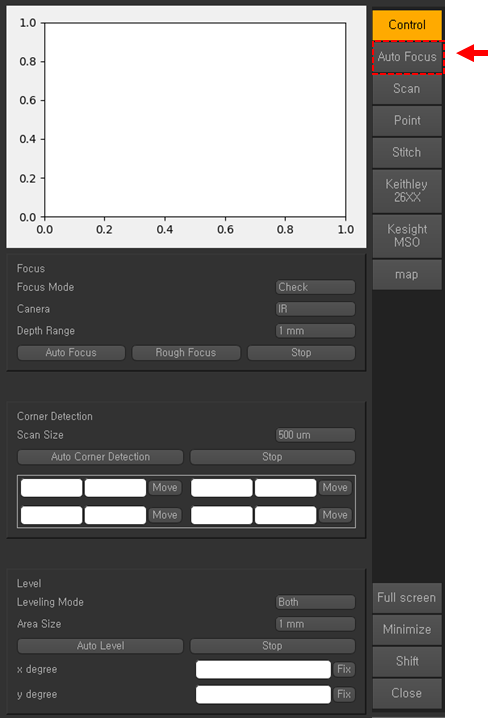
Figure 39. Auto Focus 패널
3.3.1. Focus 탭
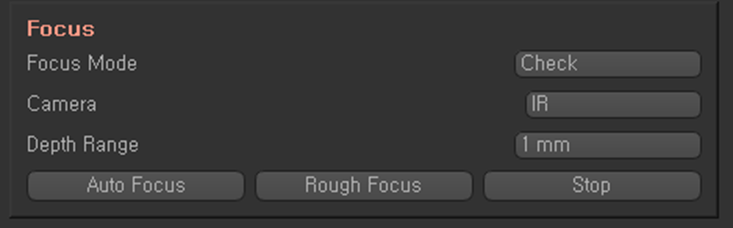
Figure 40. Focus 탭
1. Focus Mode
5가지의 자동 초점 방식이 있으며Auto Focus를 수행할 방식을 설정합니다. 모드 마다 포커스 되는 지점의 수준이 다를 수 있습니다. 각 방법은 유사한 결과를 내지만 반도체의 표면처리 상태에 따라, Front-side injection이냐 Back-side injection이냐에 따라서 Focus 방식을 선택할 수 있습니다. 예를 들어 FFT(Fast Fourier Transform 방식의 경우 만약 미러 폴리싱(mirror polishing)된 Back-side를 사용한다면 표면의 고 주파수 성분을 찾는 해당 방법은 유효하지 않을 수 있고(Mirror polishing된 표면은 고주파 성분이 많아, FFT를 통해 분석할 때 노이즈가 증가할 수 있습니다. 이는 초점 잡기에 필요한 신호 대 잡음 비율(SNR)을 저하시킬 수 있습니다.) 이런 경우 STD(Standard Deviation)나 휘도(Brightness) 방식이 더 선호될 것입니다.
- Check: 단순 포커스 계산 값을 도출함, 포커스 지점으로의 이동 안함
- FFT: FFT 방법을 이용해서 포커스를 도출 후 해당 지점으로 이동
- FFT STD: FFT로 주파수 도메인으로 변환한 이후 STD값을 구하는 방식으로 포커스 도출 후 해당 지점으로 이동
- STD: STD 값을 포커스 정도의 지표로 이용, 도출 후 해당 지점으로 이동
- Brightness(휘도): 밝기를 기준으로 포커스 정도를 파악, 도출 후 해당 지점으로 이동
2. Camera
Visual(가시광선) 또는 IR(적외선) 카메라로 설정할 수 있습니다.
3. Depth Range
현재 높이부터 위아래로 탐색할 영역을 설정합니다. 예) 1mm → +/- 0.5mm
4. 3가지 버튼의 기능
- Auto Focus: 오토 포커스 수행
- Rough Focus: 먼 거리에서 대략적인 포커스를 수행하는 기능(미구현)
- Stop: 정지
3.3.2. Corner Detection 탭
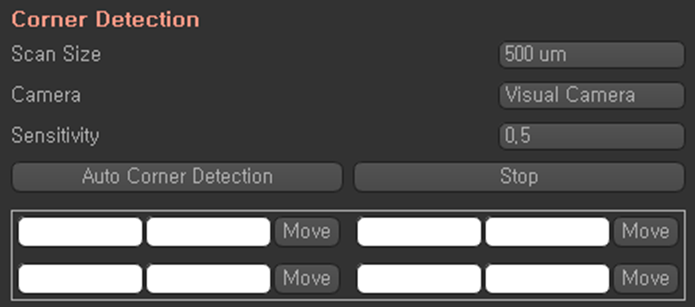
Figure 41. Corner Detection 탭
Chip Image와 실제 DUT의 좌표를 동기화하는 좌표Set-up 작업의 편리성을 위해 부착된 Chip의 4 모서리를 찾아주는 기능입니다. Pulsed Laser 장비 GUI는 Chip의 이미지를 활용하여 여러가지 기능들을 제공합니다. 이를 사용하기 위해서는 Chip의 이미지와 스테이지의 위치의 4점(4point)을 매핑해 주어야 합니다. 이 작업 시에 사각형 반도체의 네 모서리를 찾아주는 해당 기능을 사용 할 수 있습니다.
- Scan size: XY축으로 스캔할 사이즈, Chip의 사이즈 보다 크게 설정.
- Camera: 해당 기능을 사용할 때 사용할 카메라
- Sensitivity: 해당 기능은 이미지의 밝기 차이를 사용하는데 이때 밝기 차이의 기준이 되는 수치. 해당 기능이 오작동 할 시 이 수치를 변경.
- Auto Corner Detection 버튼: 기능 시작
- Move 버튼: 탐색한 4개의 포인트를 해당 버튼을 통해 해당 포인트로 이동
사용 순서 예시
- Auto Focus기능을 이용하거나 수동으로 대략적인 Focus맟춤. (Chip 내부와 외각이 구분되는 정도)
- Chip의 내부로(대강 중심) XY Stage를 이동.
- 반도체 Chip의 사이즈를 고려하여 Scan size를 설정.
- Auto Corner Detection을 클릭하여 기능을 수행. 자동으로 Stage가 상하좌우로 이동하며 코너를 탐색.
- 탐색된 결과값을 Move 버튼을 통해 확인.
3.3.3. Level 탭

Figure 42. Level 탭
Stage에 마운트 되어 있는 Chip의 기울기를 측정 및 수정하는 기능을 합니다. 사용자는 측정할 축(x, y, both), 측정 범위를 설정해서 이를 수행합니다. 현재 위치로부터 설정한 범위만큼 z축 50μm를 빠르게 측정합니다. 이후 정확도를 높이기 위해 앞선 빠른 스캔으로 찾은 부분의 주위를 측정합니다. 그러기 때문에 Chip이 너무 많이 기울어 있어서 측정 범위 내 Chip 높이가 50μm 이상 차이 나면 안되고, Leveling을 수행하기 전에 기준점에서의 Focus가 어느정도 맞지 않으면 기능 수행에 실패 할 수 있습니다. 반도체 Chip의 패키지, 납땜 상태 등등 여러 요인으로 육안으로 보았을 시에 평평해 보이더라도 레이저 테스트 시에는 10μm나 0.5도의 차이만으로도 결과에 영향을 줄 수 있습니다.
- Leveling Mode: Both- XY축에 대한 수평을 측정, X / Y- 선택한 축에 대한 수평만 측정.
- Area Size: Leveling을 수행할 때 일정 범위의 스캔을 수행하는데 이 때의 스캔 범위
- Auto Level 버튼: 해당 기능 시작
- Fix 버튼: 해당 기능을 통해서 찾은 leveling 값 적용
사용 순서 예시
- Chip의 내부로(대강 중심) XY Stage를 이동.
- Auto Focus 기능을 이용하거나 수동으로 대략적인 Focus를 맞춤. (Chip 내부와 외각이 구분되는 정도)
- Mode와 Size를 설정.
- Auto Level 버튼을 클릭하여 실행.
- 그래프로 보이는 결과를 확인해서 측정과 기울기 계산이 정확한지 판단.
- 계산된 기울기 값을 Fix 버튼을 클릭하여 적용.
3.4. Scan 패널
Scan 패널은 레이저를 통한 스캔 계획을 생성, 관리, 저장할 수 있는 패널입니다.
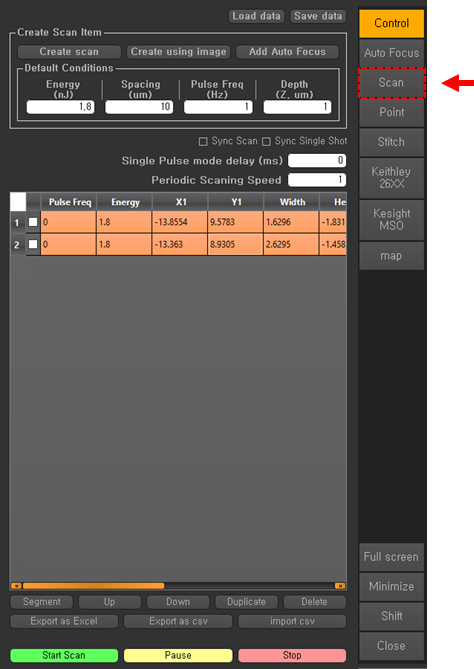
Figure 43. Scan 패널
3.4.1. Create Scan Item
해당 프로그램에서 스캔 아이템을 추가하는 방법은 두가지가 있습니다. 하나는 시작점과 범위를 직접 입력해 주는 방법과 이미지를 드래그 해서 추가하는 방법입니다.
1. Create Scan
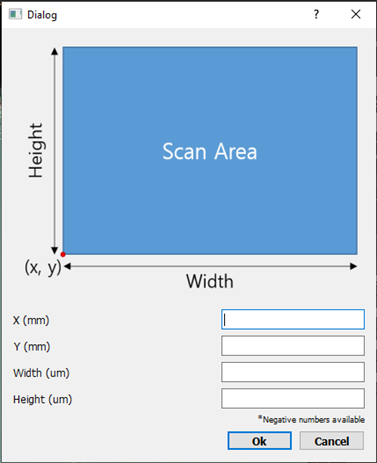
Figure 44. Create Scan
Create scan을 통해서 값을 직접 입력하는 방식으로 스캔을 생성할 수 있습니다.
- X, Y: 스캔 시작 좌표
- Width, Height: 스캔 범위의 크기 값 (음의 값으로 설정 가능, 스캔이 진행되는 방향)
2. Create using image
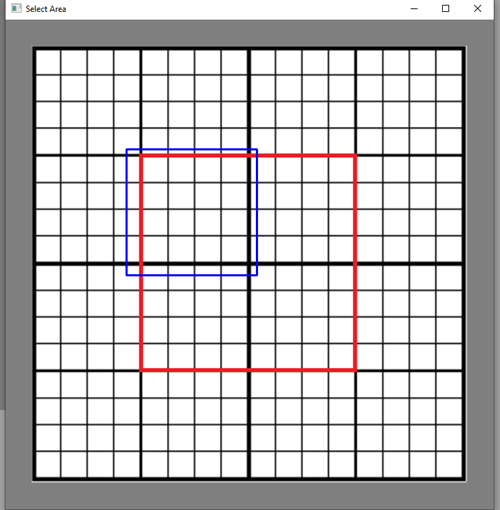
Figure 45 Create using image
Create using image 버튼을 누르게 되면 현재 작업중인 이미지가 팝업으로 나옵니다. 드래그로 스캔하고 싶은 영역을 지정하면 해당 영역이 스캔리스트에 추가됩니다. 드래그 시 처음 클릭한 위치가 스캔 시작 위치이고 드래그 방향으로 Width, Height 값의 음/양을 설정합니다.
3.4.2. Scan Setting
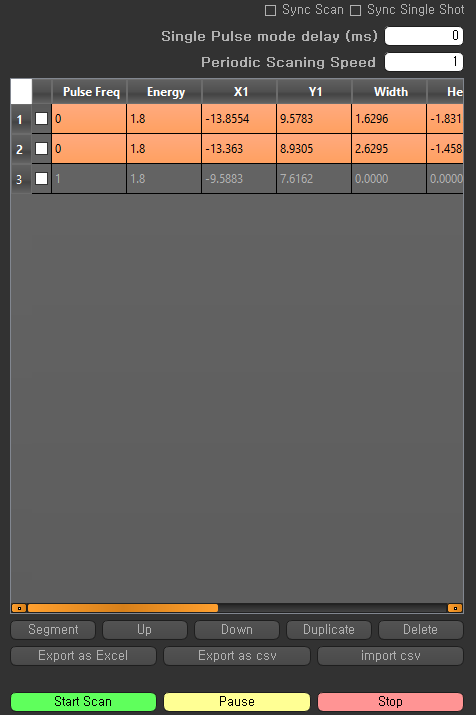
Figure 46. Scan setting
- Single pulse delay: 싱글 모드로 설정 시 각 레이저 사이에 들어갈 delay, 해당 값을 0으로 하면 스캔 속도는 대략적으로 20Hz 정도가 됨. (Spacing 값에 따라서 다름) 이때 스캐닝의 속도를 느리게 해야 된다면 해당 딜레이 값을 설정해서 조절 가능.
- Periodic Scanning Speed: 1Hz ~ 1000Hz 등 레이저가 일정 주파수로 설정 되었을 때 스캔 이동 속도, 1~1000 의 정수 값
- Pulse Freq: 레이저 발진 주파수, [0, 1, 10, 100, 500, 1000]으로 설정 가능, 0일 경우 Single shot 모드이다. Single shot에서는 위치에 도달하고 레이저 1회 발진 수행.
- Energy: 레이저 에너지를 nJ 단위로 입력, 해당에너지를 기준으로 스캐닝 시의 편광자를 조절함, 이를 위해서 스캔 이전에 알맞은 에너지 측정 파일을 세팅해야 함.
- X1, Y1: 스캔 시작 기준 좌표
- Width, Height: 스캔 할 범위의 넓이
- Depth: 스캔을 진행할 깊이를 설정하고 테스트의 일관성을 확보하기 위해, 스캔 시작 전에 Chip 표면에 대한 포커스를 조정하고 해당 값을 명확히 지정한 후 테스트를 수행할 것을 권장.
- Spacing: single shot 모드일 시 각 레이저의 간격 (단위: μm)
- Point: 주어진 값으로 계산된 포인트 개수 (자동 출력 값)
- Exp time: 추정 시간 값 (자동 출력 값, 미구현)
- Segment: 선택 항목의 영역을 분할
- Up / Down: 선택 항목을 이동
- Duplicate: 선택 항목 복사
- Delete: 선택 항목 삭제
3.4.3. Scan 시작
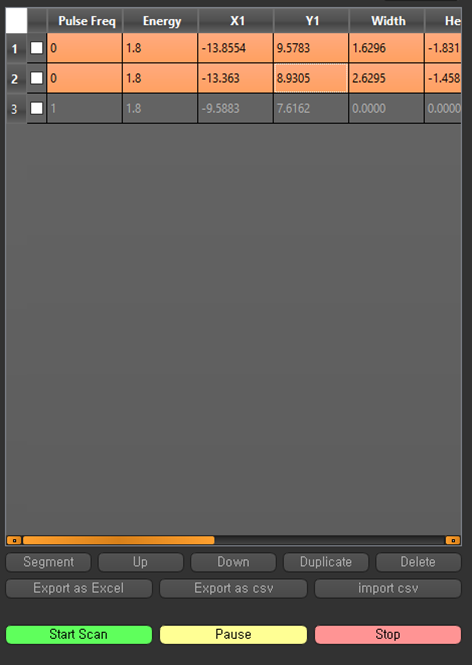
Figure 47. Scan 시작
리스트에서 진행 하고자 하는 스캔을 선택하여 수행(복수 선택)할 수 있습니다 선택된 스캔은 주황색으로 표시되며 이후 Start Scan 을 통하여 스캔을 시작 할 수 있고, Pause를 통해 일시 정지, Stop을 통해 중단 할 수 있습니다. 스캔 진행중에는 현재 진행중인 스캔은 파란색, 완료된 스캔은 초록색, 실패 또는 중단한 스캔은 빨간색으로 스캔 리스트에서 바뀌게 됩니다.
3.5. Point 패널
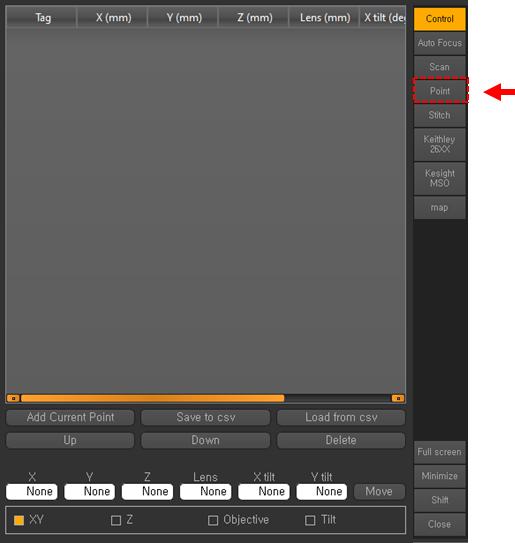
Figure 48. Point 패널
원하는 곳에 임의로 Point를 설정할 수 있는 기능입니다. Scan 패널은 설정한 영역 전체를 평가한다면 Point패널에서는 원하는 Point에 레이저를 조사하며 평가할 수 있습니다.
1. Point 설정
- Add Current Point: 현재 상태를 리스트에 추가
- Save to csv: 리스트를 csv로 저장
- Load from csv: csv를 불러와서 리스트에 추가
- Up, Down, Delete: 항목 이동 및 삭제
2. Point 항목
- Tag: 사용자가 편의를 위해서 임의로 기입하는 항목
- X, Y, Z: XYZ 스테이지의 위치 값
- Lens: Objective stage의 위치 값
- X, Y tilt: X, Y 기울기 값
3. Point를 이용한 이동
리스트에서 하나를 클릭하여 값을 불러 올 수 있습니다.
XY, Z, Objective, Tilt중 항목을 체크해서 해당 스테이지에 대한 이동을 수행합니다.
- Z축 이동 시 렌즈가 다른 물체에 닿지 않도록 유의해서 사용
3.6. Stitch 패널
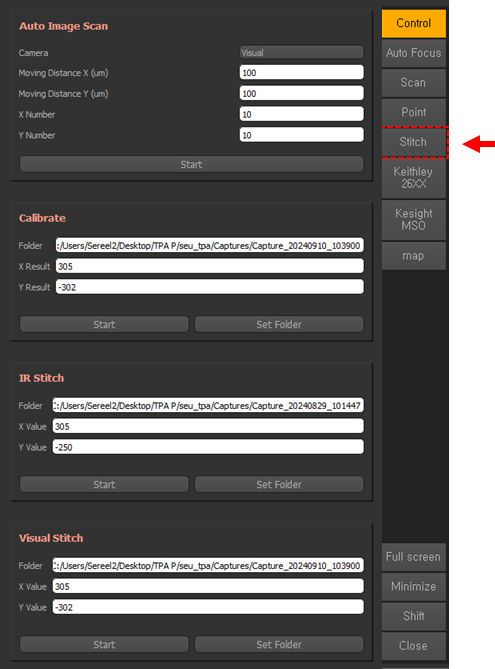
Figure 49. Stitch 패널
Visual 또는 IR 카메라를 이용해 Chip 이미지를 만드는 기능입니다. 여러 장의 이미지를 이어 붙여 하나의 이미지로 만드는 방식입니다. Chip이 커서 5배 렌즈에 Chip전체가 보이지 않을 때 사용합니다.
3.6.1. Auto Image Scan
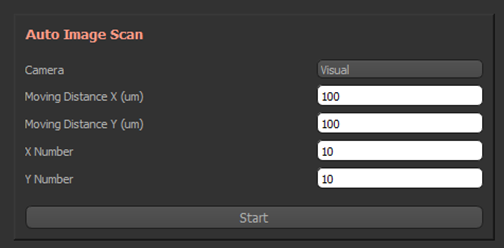
Figure 50. Auto Image Scan
Crosshair를 Chip의 Center에 맞춘 뒤 실행합니다.
- Camera: Visual / IR 로 설정 가능
- Moving Distance X/Y: 한 장 찍고 다음 장을 찍을 때 카메라가 이동할 거리
- X/Y Number: X, Y 축으로 사진을 몇 장 찍을지 설정
3.6.2. Calibrate
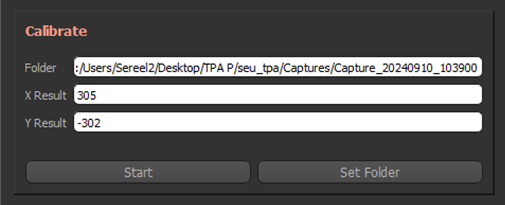
Figure 51. Calibrate
Folder에 Auto Image Scan으로 캡처한 이미지가 들어있는 폴더를 선택한 후 Start를 누르면 X, Y Result에 Stitching용 Parameter가 출력됩니다.
- Folder: Capture한 Image가 들어있는 폴더를 넣음.
- X, Y Result: Stitching Parameter
3.6.3. Visual, IR Stitch
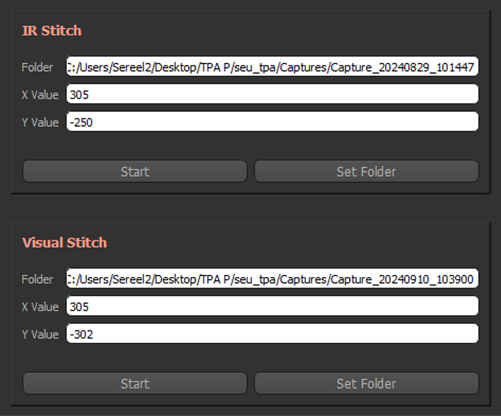
Figure 52. Visual, IR Stitch
폴더에 캡처한 이미지를 넣고 X, Y Value에 X, Y Result값을 넣고 Start를 누르면 여러 장의 이미지들이 하나의 이미지로 합쳐집니다.
- Folder: Capture한 이미지 폴더를 넣음.
- X, Y Value: Calibrate의 X, Y Result값을 넣음.
3.7. Keysight MSO 패널
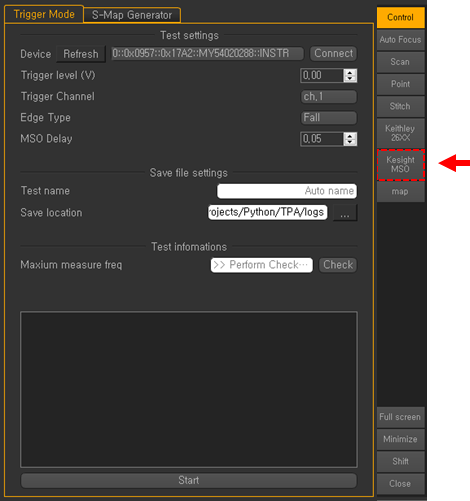
Figure 53. MSO 패널
3.7.1. 오실로스코프(MSO)를 이용한 트리거 측정
Keysight의 오실로스코프를 사용해서 SET를 관찰하려 할 때 사용합니다. (다른 오실로스코프도 사용 가능할 것이나 확인 필요) 사용자가 설정해둔 트리거 컨디션에 따라서 트리거가 발생할 경우 설정된 경로에 파형이 기록된 파일을 발생한 시간을 파일명으로 남깁니다. 대략적인 측정 속도는 10Hz 수준입니다.
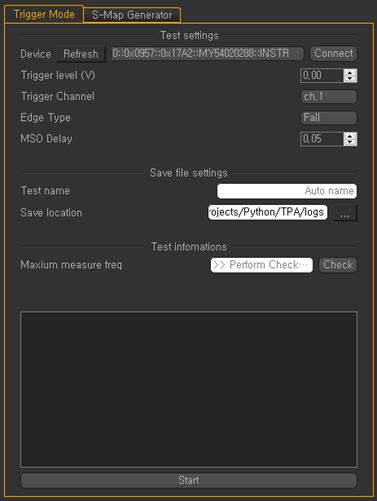
Figure 54. Trigger Mode
3.7.1.1. 측정 실행
Keysight의 오실로스코프를 사용해서 SET를 관찰하려 할 때 사용합니다. (다른 오실로스코프도 사용 가능할 것이나 확인 필요) 사용자가 설정해둔 트리거 컨디션에 따라서 트리거가 발생할 경우 설정된 경로에 파형이 기록된 파일을 발생한 시간을 파일명으로 남깁니다. 대략적인 측정 속도는 10Hz 수준입니다.
- Device: Refresh를 통해 연결된 장치 검색, 맞는 MSO 선택 후 connect 버튼을 통해서 연결
- Trigger level: 트리거 레벨을 설정, 정상 동작 전압에서 500mV 이상 차이를 둘 것을 권장(트리거가 안 찍힐 때가 있음)
- Trigger channel: 오실로스코프의 트리거 걸릴 채널을 설정
- Edge type: 트리거의 에지 타입을 설정
- MSO delay: 가장 낮은 값으로 설정하는 것을 권장. 오실로스코프의 종류에 따라 통신이 너무 빨리 이뤄지게 되면 오실로스코프가 먹통이 되는 현상이 있어 동작을 느리게 만드는 딜레이
- Check: 현재 세팅으로 나오는 측정 속도 측정 (미구현)
- Start: 눌러서 측정 수행, 다시 눌러서 중단
3.7.1.2. 오실로스코프(MSO)를 이용한 민감 영역 분석(Sensitive Area) 이미지 생성
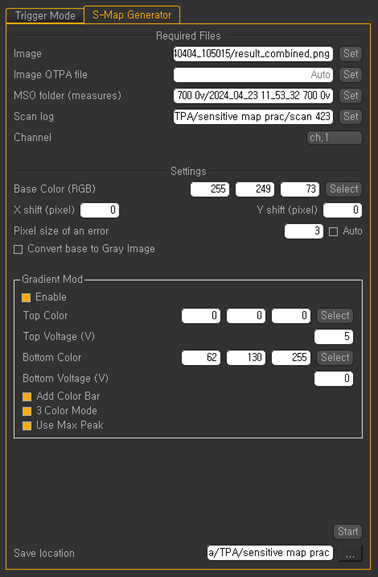
Figure 55. S-Map Generator 탭
|
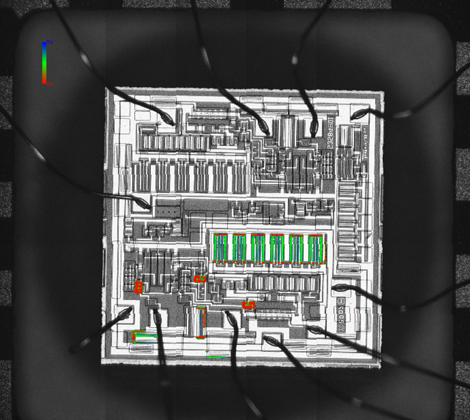
Figure 56. S-Map Example
|
Chip의 Sensitive Area를 분석한 이미지를 생성하는 탭입니다.
- Image: Chip Image file
- Image QTPA file: Image file폴더에 있는 QTPA파일
- MSO folder: MSO trigger log folder
- Scan log: Scan log folder
- Base Color: 단일 색으로 표현 시 사용할 색 설정
- Shift: 실제 좌표와 S-Map의 좌표 쉬프트가 생겼을 시 사용
- Pixel size of an error: 에러 하나당 표시할 픽셀 수
- Convert base to Gray Image: Chip Image 흑백모드
- Gradient Enable: 체크 시 2개의 색으로 S-Map 생성
- Top / Bottom Color: 상위 색과 하위 색 설정(2 / 3개의 색으로 표현 시)
- Top / Bottom Voltage: Voltage Range
- Add Color Bar: 좌측 상단의 컬러 바 on / off
- 3 Color Mode: 활성화 시 Top, Base, Bottom 3가지 색으로 S-Map 생성
- Use Max Peak: SET발생 전압이 양수일 시 체크